Defence
Situative Autonomie für gefährdete Offroad-Mobilität
Situational autonomy for contested off-road mobility
Militärische Mobilität wird zunehmend durch die Notwendigkeit geprägt, Menschen, Versorgungsgüter und kritische Assets durch komplexes Gelände zu bewegen und gleichzeitig die direkte Gefährdung von Personal zu reduzieren. Taktische Fahrzeuge müssen jenseits befestigter Straßen operieren, etwa über degradierte Oberflächen, schmale Wege, Schlamm, Steigungen, Hindernisse und unter eingeschränkten Sichtbedingungen.
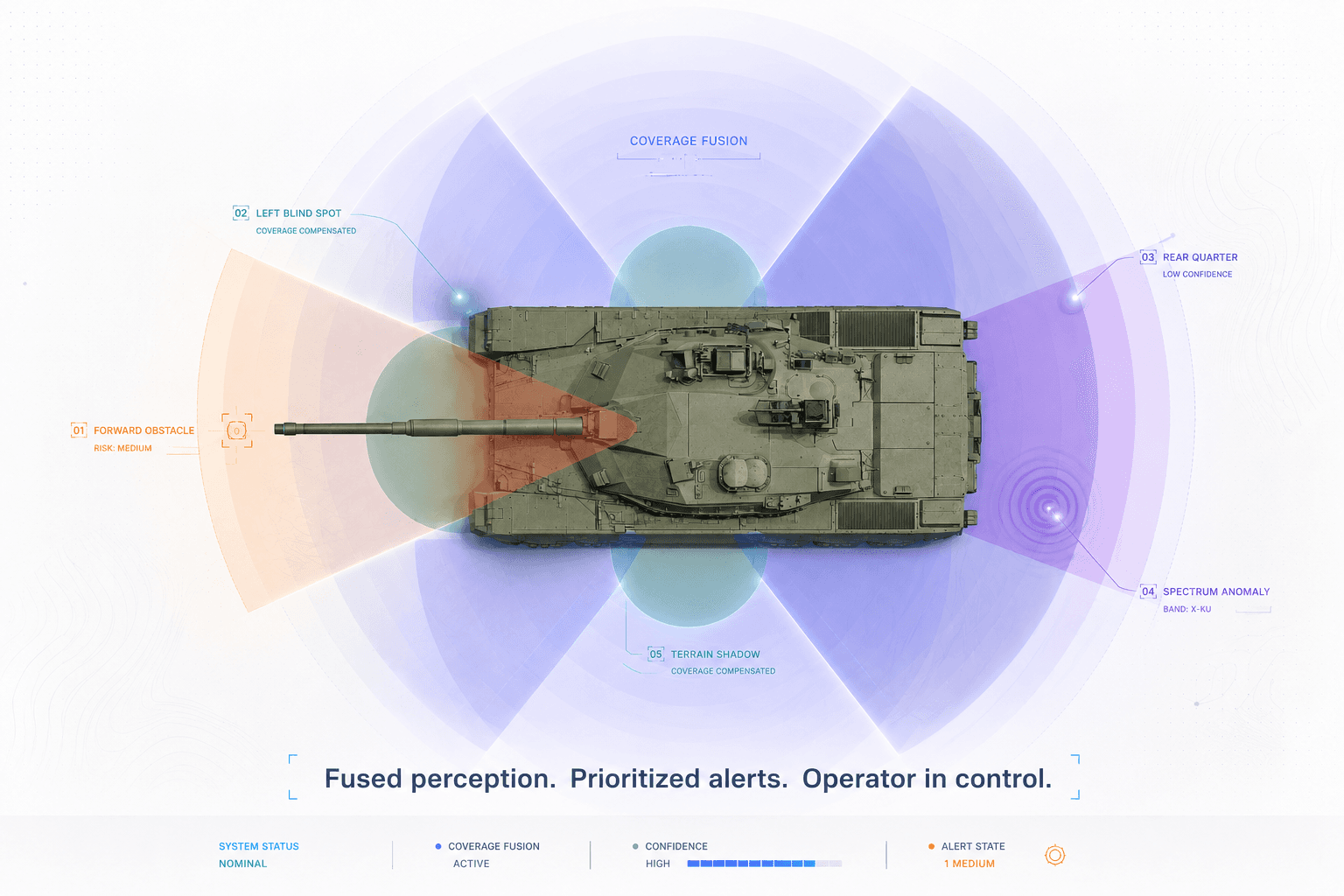
VAIVA entwickelt Autonomie- und Operator-Assistance-Konzepte für Offroad-Defence-Plattformen, bei denen der Mensch die Kontrolle über die Mission behält, während das Fahrzeug ausgewählte Fahraufgaben übernimmt. Anstatt die Kontrolle vollständig an das System zu übergeben, definiert der Operator Wegpunkte, Zielbereiche oder Routenkorridore. Das Fahrzeug nutzt anschließend Onboard Perception, Prediction und Path Planning, um zwischen diesen Punkten zu navigieren.
So entsteht ein praxistaugliches Autonomiemodell für militärische Operationen: überwacht, kontrollierbar und konsequent an der Missionslogik ausgerichtet.
Entwickelt für waypoint-basierte Teleoperation
In einem Setup für situative Autonomie muss der Operator nicht jede Lenk-, Brems- oder Beschleunigungsaktion manuell steuern. Stattdessen definiert er die Absicht - beispielsweise einen Wegpunkt, einen sicheren Haltepunkt, einen Versorgungspunkt oder einen Evakuierungsaufnahmepunkt - und das Fahrzeug übernimmt automatisiert die lokale Fahraufgabe.
Das Onboard-System kann Gelände bewerten, Hindernisse erkennen, befahrbare Korridore identifizieren und den Pfad in Echtzeit anpassen. Wird die Situation unklar oder überschreitet definierte Sicherheitsgrenzen, kann das System Operator-Eingaben anfordern, verlangsamen, anhalten oder in einen Remote-Control-Modus wechseln.
Das macht das Konzept besonders relevant für:
Taktische Logistik in unstrukturiertem Gelände
CASEVAC-Unterstützung, wenn Risiken für Sanitätskräfte und Besatzungen reduziert werden müssen
Forward Resupply in Gebieten mit eingeschränktem Straßenzugang
Remote Vehicle Movement aus geschützten oder abgesetzten Operator-Positionen
Konvoi- und Unterstützungsoperationen, bei denen ausgewählte Fahrzeuge mit reduzierter Besatzungsexposition betrieben werden können
Test und Validierung autonomer Offroad-Verhaltensweisen vor dem Einsatz
Das Ziel ist operative Flexibilität: Fahrzeuge sollen definierte Mobilitätsaufgaben mit geringerem manuellem Aufwand und reduzierter Personalexposition ausführen können.
Onboard Perception, Prediction und Path Planning
Für Offroad-Autonomie muss das Fahrzeug idealerweise Geländegeometrie, Oberflächenbeschaffenheit, Hindernisse, Fahrzeugdynamik und Missionsrestriktionen in Echtzeit verstehen.
VAIVA unterstützt Kunden bei der Entwicklung von Perception- und Planning-Funktionen, die Defence-Plattformen dabei helfen, geeignete Offroad-Routen zu identifizieren und sicher auszuführen. Dies kann Multi-Sensor-Perception, Objekt- und Terrainklassifikation, Trajektorienprädiktion, Path Planning sowie Assistenzlogik umfassen, die auf die operative Rolle des Fahrzeugs zugeschnitten ist.
Ein leistungsfähiges System kann unter anderem unterstützen bei:
Drivable-Terrain Detection auf Wegen, Schotter, Schlamm, Steigungen, Vegetation und degradiertem Untergrund
Hinderniserkennung und -vermeidung für Felsen, Gräben, Barrieren, Trümmer und andere Fahrzeuge
Prädiktion des Fahrzeugverhaltens auf Basis von Gelände, Geschwindigkeit, Neigung und Stabilitätsgrenzen
Lokaler Pfadplanung zwischen vom Operator definierten Wegpunkten
Remote Supervision und Intervention, wenn das System definierte Unsicherheitsschwellen erreicht
Missionsorientierter Safety Logic für Anhalten, Umrouten, Fallback-Strategien und Handover-Szenarien
Durch die Kombination von Autonomie-Engineering, Simulation und Validierung unterstützt VAIVA Kunden dabei, Systeme zu entwickeln, die von Beginn an robust, testbar und kontrollierbar sind.
Retrofit- oder New-Platform-Integration
Situative Autonomie kann auf zwei Arten realisiert werden: als Autonomie-Upgrade für bestehende Fahrzeugflotten oder als gemeinsamer Entwicklungsbaustein in einer neuen Defence-Fahrzeugplattform.
Für bestehende taktische Trucks und Offroad-Plattformen kann VAIVA die Entwicklung von Retrofit-Autonomiekonzepten unterstützen, die Sensorik, Compute, Software, Steuerungsschnittstellen und Validierungsworkflows in bestehende Fahrzeugarchitekturen integrieren.
Für neue Fahrzeugprogramme kann VAIVA gemeinsam mit OEMs, Systemintegratoren und Defence-Kunden bereits ab der Konzeptphase arbeiten — und Sensorplatzierung, Perception-Architektur, Fahrzeugsteuerung, HMI, Safety Logic und simulationsbasierte Validierung zu einem kohärenten Autonomy Stack zusammenführen.
So können Defence-Organisationen heute mit praxistauglicher, überwachter Autonomie starten und gleichzeitig schrittweise höhere Grade automatisierter Mobilität aufbauen.