Defence
Realistische Perception vor dem Feldeinsatz
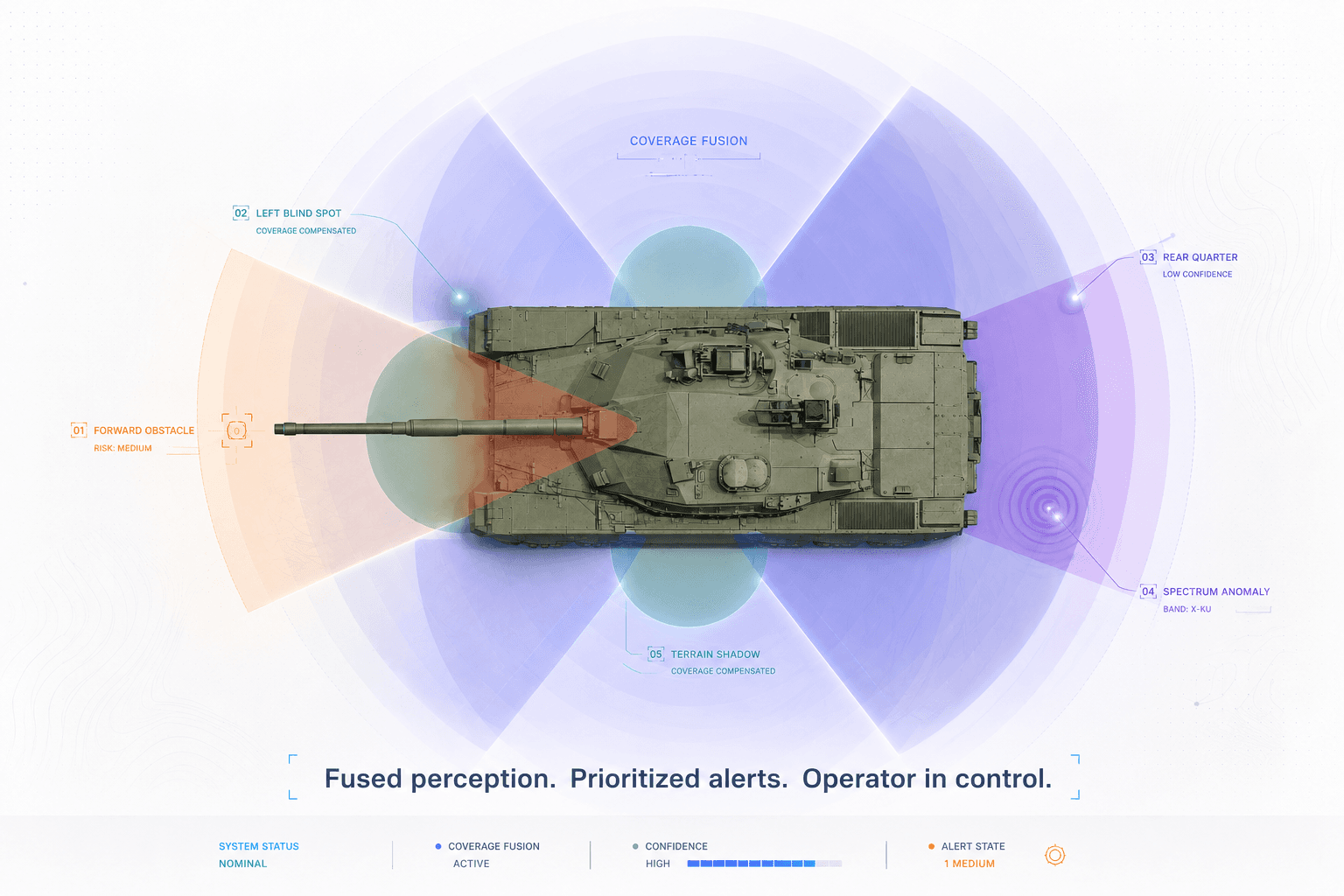
Sensorbasierte Defence-Funktionen sind nur so zuverlässig wie die Wahrnehmung, auf der sie aufbauen. Ob es um Counter-UAS, Force Protection, Reconnaissance, autonome Mobilität oder optronische Ziel- und Sichtsysteme geht: Entwicklungsteams müssen verstehen, wie sich ihre Systeme verhalten, bevor physische Tests verfügbar sind und bevor kostenintensive Testkampagnen beginnen.
VAIVA entwickelt hochrealistische Simulationsumgebungen, in denen sensorgetriebene Defence-Systeme unter kontrollierten Bedingungen konzipiert, trainiert, getestet und validiert werden können. Optische und multispektrale Sensoren können so emuliert werden, dass sie widerspiegeln, wie reale Systeme Gelände, Materialien, Atmosphäre, Clutter und Ziele in wechselnden Einsatzumgebungen wahrnehmen.
So entsteht eine praxistaugliche Entwicklungsumgebung für moderne Defence-Programme: realistisch, konfigurierbar und ausgerichtet auf missionsrelevantes Sensorverhalten.
Einsatznahe Bausteine, zugeschnitten auf die Mission
VAIVA bietet ein breites Set an Simulations- und Emulationsbausteinen, die direkt in Defence-Programme integriert werden können. Gleichzeitig sind unsere Lösungen bewusst modular aufgebaut, sodass sie an spezifische Sensorsuites, Plattformen, Missionsprofile und Bedrohungsszenarien angepasst werden können.
Durch die Verknüpfung von Simulation Ground Truth mit sensorspezifischer Bilderzeugung entstehen Daten und Evaluierungsergebnisse, die sowohl nachvollziehbar als auch operativ relevant sind. Statt sich auf generische synthetische Bilddaten zu verlassen, können Kunden mit realistischen Sensoransichten arbeiten, die durch die spezifischen optischen Eigenschaften, Spektralbänder, Geometrien und Missionsbedingungen des zu entwickelnden Systems geprägt sind.
Das ermöglicht frühere technische Entscheidungen, gezieltere Tests und ein höheres Vertrauen in sensorbasierte Fähigkeiten.
Beispielanwendungen
Trainingsdaten für Drohnenerkennung bei allen Wetterbedingungen
Systeme zur Drohnenerkennung und -klassifikation benötigen Trainings- und Testdaten, die auch bei wechselnden Sicht-, Licht- und atmosphärischen Bedingungen robust bleiben. VAIVA kann realistische Trainingsumgebungen erzeugen, in denen exakte Simulation Ground Truth mit sensorspezifischem Rendering gekoppelt wird, das auf reale optische Systeme abgestimmt ist.
Erkennung getarnter gegnerischer Positionen
Moderne Sensorsysteme müssen mehr erkennen als offensichtliche Ziele. Zunehmend geht es darum, getarnte Positionen, verdeckte Assets und schwer beobachtbare Objekte zu identifizieren, die in natürlichem Clutter eingebettet sind.
VAIVA unterstützt die Erzeugung realistischer Trainings- und Testdaten für diese Bedingungen, indem Materialien, Vegetation, Boden, Abdeckungen und Tarnstrukturen physikalisch plausibel modelliert werden. Die Darstellung kann an unterschiedliche Spektralbänder angepasst werden - zum Beispiel sichtbar oder IR - um die Entwicklung von Perception-Funktionen zu unterstützen, die über klassische Tageslichtbildgebung hinaus funktionieren müssen.
Virtuelle Auslegung und Bewertung optronischer Systeme
Bevor physische Prototypen aufgebaut werden, müssen Defence-Programme häufig wissen, ob ein optronisches System für seine vorgesehene Mission korrekt konfiguriert ist. Sichtfeld, Reichweite, Montageposition, Auflösung und Line-of-Sight-Verhalten beeinflussen die Missionsleistung maßgeblich.
VAIVA ermöglicht es, Landschaften, Bauwerke, Geländeprofile und Plattformkontexte realistisch zu simulieren, sodass optronische Systeme für Fahrzeug- oder Waffenmodule bereits in einer frühen Phase virtuell bewertet werden können. Das unterstützt schnellere Design-Iterationen und fundiertere technische Entscheidungen vor der Hardware-Integration.
Simulation der Bodenbeschaffenheit für Pfadplanung (Path Planning)
Autonome und assistierte Mobilitätsfunktionen hängen davon ab, wie gut Perception-Systeme das vorausliegende Umfeld interpretieren. Unterschiedliche Oberflächenbedingungen wie Sand, Schlamm, Schotter, Vegetation oder degradierter Boden können Routenwahl und Path Planning erheblich beeinflussen.
VAIVA kann diese Oberflächen visuell und operativ aussagekräftig simulieren. Dadurch lassen sich bildbasierte Algorithmen für Path Planning und Terrain Interpretation über wechselnde Jahreszeiten, Tageslichtbedingungen und vegetationstypische Schatteneffekte hinweg trainieren und testen.
From Simulation Ground Truth to Sensor Truth
Der Wert synthetischer Umgebungen hängt von ihrer Fidelity ab. Entwicklungsteams benötigen nicht nur visuell plausible Szenen, sondern sensorrelevante Outputs, die auf bekannte Ground Truth zurückgeführt werden können.
VAIVA verbindet exakte Simulation Ground Truth mit realistischer Sensor-Emulation, sodass Entwickler vergleichen können, was physisch in der Szene vorhanden ist und was der Sensor tatsächlich erfassen würde. Das unterstützt aussagekräftigere Trainingsdaten, robustere Algorithmenbewertung und bessere Validierungsworkflows für sensorbasierte Defence-Systeme.
Das Ergebnis ist nicht einfach synthetisches Bildmaterial. Es ist eine strukturierte Umgebung für den Aufbau missionsbereiter Perception-Systeme.
Capability Section
Unsere Arbeit kann unter anderem umfassen:
High-Fidelity Optical and Multispectral Sensor Emulation
Erzeugung von Sensoroutputs, die widerspiegeln, wie reale Systeme Gelände, Atmosphäre, Clutter und Ziele wahrnehmenSimulation Ground Truth Integration
Verknüpfung exakter Szenenwahrheit mit sensorspezifischer Bildgebung für nachvollziehbare Entwicklungs- und EvaluierungsworkflowsTraining-Data Generation
Erstellung missionsrelevanter Datensätze für Detektions-, Klassifikations- und Perception-Aufgaben über variable Licht-, Wetter- und Jahreszeitenbedingungen hinwegCamouflage and Concealment Modelling
Abbildung von Vegetation, Abdeckungen, Materialeigenschaften und Umwelt-Clutter für realistische Szenarien mit schwer erkennbaren ZielenVirtual Optronics Evaluation
Bewertung von Line of Sight, Sichtfeld, Reichweite, Platzierung und Auflösung, bevor physische Prototypen verfügbar sindTerrain and Surface Simulation
Modellierung von Bodenbeschaffenheiten und Umgebungskontext für mobilitätsbezogene Perception- und Path-Planning-FunktionenSimulation and Validation Workflows
Testen von Perception-Systemen unter kontrollierten, wiederholbaren Bedingungen vor Live Trials und Feldeinsatz