Defence
Situational autonomy for at-risk off-road mobility
Situational autonomy for contested off-road mobility
Military mobility is increasingly shaped by the need to move people, supplies, and critical assets across complex terrain while reducing the direct exposure of personnel to risk. Tactical vehicles must operate beyond paved roads, for example over degraded surfaces, narrow tracks, mud, slopes, obstacles, and in limited-visibility conditions.
VAIVA develops autonomy and operator-assistance concepts for off-road defense platforms in which the human retains control over the mission while the vehicle takes over selected driving tasks. Instead of handing control over to the system completely, the operator defines waypoints, target areas, or route corridors. The vehicle then uses onboard perception, prediction, and path planning to navigate between these points.
This creates a practical autonomy model for military operations: supervised, controllable, and consistently aligned with mission logic.
Designed for waypoint-based teleoperation
In a setup for situational autonomy, the operator does not have to manually control every steering, braking, or acceleration action. Instead, they define the intent - for example, a waypoint, a safe hold point, a resupply point, or a casualty pickup point - and the vehicle automatically handles the local driving task.
The onboard system can assess terrain, detect obstacles, identify drivable corridors, and adapt the route in real time. If the situation becomes unclear or exceeds defined safety limits, the system can request operator input, slow down, stop, or switch to remote-control mode.
This makes the concept especially relevant for:
Tactical logistics in unstructured terrain
CASEVAC support when risks to medical personnel and crews must be reduced
Forward resupply in areas with limited road access
Remote vehicle movement from protected or dismounted operator positions
Convoy and support operations in which selected vehicles can be operated with reduced crew exposure
Testing and validation of autonomous off-road behaviors before deployment
The goal is operational flexibility: vehicles should be able to perform defined mobility tasks with less manual effort and reduced personnel exposure.
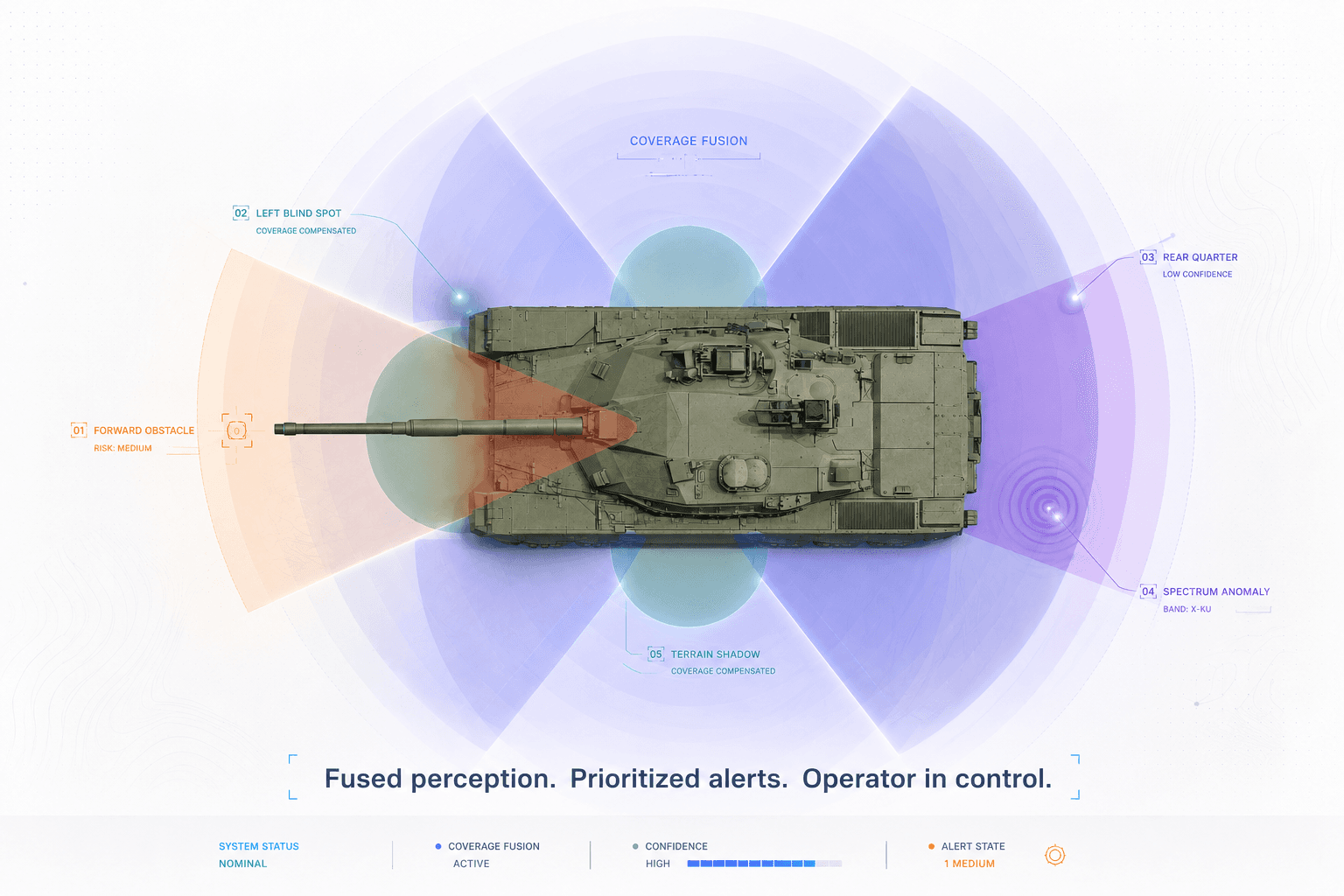
Onboard Perception, Prediction, and Path Planning
For off-road autonomy, the vehicle should ideally understand terrain geometry, surface condition, obstacles, vehicle dynamics, and mission constraints in real time.
VAIVA supports customers in developing perception and planning functions that help defense platforms identify suitable off-road routes and execute them safely. This can include multi-sensor perception, object and terrain classification, trajectory prediction, path planning, and assistance logic tailored to the vehicle's operational role.
A high-performance system can support, among other things:
Drivable terrain detection on trails, gravel, mud, slopes, vegetation, and degraded ground
Obstacle detection and avoidance for rocks, ditches, barriers, debris, and other vehicles
Prediction of vehicle behavior based on terrain, speed, incline, and stability limits
Local path planning between waypoints defined by the operator
Remote supervision and intervention when the system reaches defined uncertainty thresholds
Mission-oriented safety logic for stopping, rerouting, fallback strategies, and handover scenarios
By combining autonomy engineering, simulation, and validation, VAIVA helps customers develop systems that are robust, testable, and controllable from the outset.
Retrofit or new-platform integration
Situational autonomy can be implemented in two ways: as an autonomy upgrade for existing vehicle fleets or as a shared development building block in a new defense vehicle platform.
For existing tactical trucks and off-road platforms, VAIVA can support the development of retrofit autonomy concepts that integrate sensors, compute, software, control interfaces, and validation workflows into existing vehicle architectures.
For new vehicle programs, VAIVA can work with OEMs, system integrators, and defense customers from the concept phase onward — bringing together sensor placement, perception architecture, vehicle control, HMI, safety logic, and simulation-based validation into a coherent autonomy stack.
This allows defense organizations to start today with practical, supervised autonomy while progressively building higher levels of automated mobility.