Defence
Intelligent networking for secure mobility
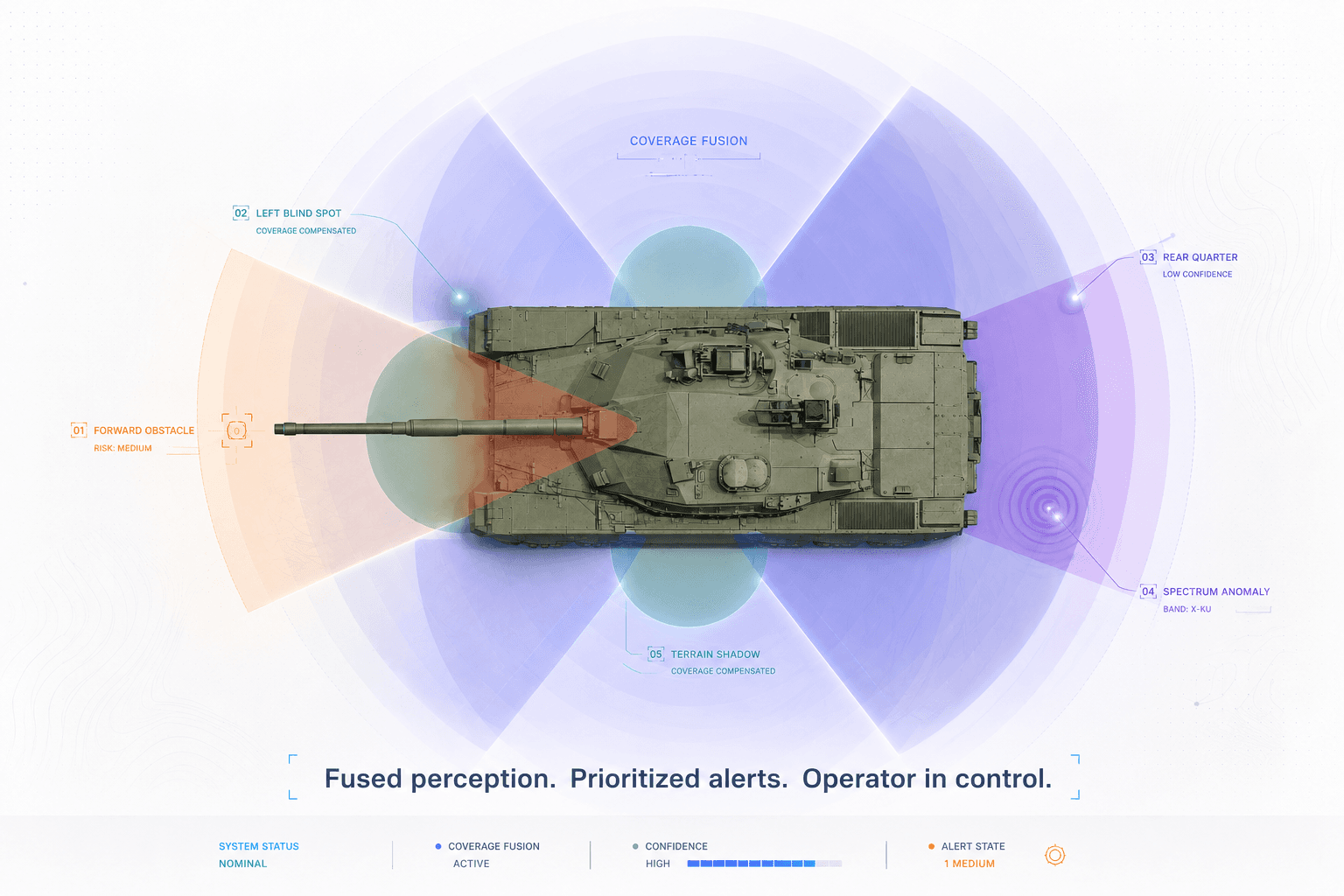
Protected 360° Situational Picture
Crew members of military vehicles need more than just a camera image. They need a reliable, low-latency understanding of what is happening around the platform, day and night, in complex terrain and in unclear operational environments.
VAIVA develops perception and assistance concepts that combine multi-sensor data into a coherent 360° situational picture of the vehicle surroundings. Camera, thermal, radar, vehicle dynamics, and mission system data can be fused to support drivers, commanders, or a "Remote Operator" with prioritized alerts and action-relevant information.
The result: better detection, faster interpretation, and improved controllability without unnecessary additional cognitive load.
Developed for the reality of protected mobility
A 360° situational awareness system must function where conventional visibility reaches its limits. For tactical trucks and protected mobility platforms, the system can support, among other things:
Low-visibility perception in darkness, rain, or otherwise restricted visibility conditions
Collision and blind-spot warning around the entire vehicle perimeter
Obstacle and terrain risk detection during tight maneuvers and complex routes
Rollover-risk prediction by combining perception and vehicle dynamics data
AI-supported anomaly detection for unusual motion patterns, sensor inconsistencies, or electromagnetic or spectral irregularities
Prioritized operator alerts aligned with mission relevance
The focus is on robust assistance: helping the crew understand the situation, maintain control, and make better decisions under operational conditions – over the maximum mission duration.
Mission-oriented AI and sensor fusion
VAIVA brings automotive-grade perception, prediction, simulation, and safety engineering into defence-relevant systems. We support customers in the development and validation of AI-supported functions that are explainable, testable, and aligned with the operational role of the platform.
Our work can include, among other things:
Sensor Fusion and Perception
Combination of RGB, IR, radar, and vehicle-state data into a reliable environmental model; active and passive sensors according to mission requirementsPrediction and Risk Assessment
Anticipation of motion trajectories, collision risks, terrain hazards, and rollover-critical situationsOperator Assistance Logic
Design of warnings and assistance functions with consideration for driver workload, mission context, and controllabilityAI-supported Anomaly Detection
Detection of unusual sensor patterns, unexpected object behavior, degraded perception quality, or spectral irregularities that can affect the reliability of mission systemsSimulation and Validation
Virtual testing of edge cases before field trials, including restricted visibility, sensor degradation, complex maneuvers, and multi-object scenarios


