Defence
Realistic perception before field deployment
Sensor-based defence functions are only as reliable as the perception on which they are built. Whether it is Counter-UAS, Force Protection, Reconnaissance, autonomous mobility, or optronic targeting and sighting systems: development teams must understand how their systems behave before physical tests are available and before costly test campaigns begin.
VAIVA develops highly realistic simulation environments in which sensor-driven defence systems can be designed, trained, tested, and validated under controlled conditions. Optical and multispectral sensors can be emulated in a way that reflects how real systems perceive terrain, materials, atmosphere, clutter, and targets in changing operational environments.
This creates a practical development environment for modern defence programs: realistic, configurable, and focused on mission-relevant sensor behavior.
Mission-oriented building blocks, tailored to the mission
VAIVA offers a broad set of simulation and emulation building blocks that can be integrated directly into defence programs. At the same time, our solutions are deliberately modular, so they can be adapted to specific sensor suites, platforms, mission profiles, and threat scenarios.
By linking simulation ground truth with sensor-specific image generation, data and evaluation results are created that are both traceable and operationally relevant. Instead of relying on generic synthetic image data, customers can work with realistic sensor views shaped by the specific optical properties, spectral bands, geometries, and mission conditions of the system being developed.
This enables earlier technical decisions, more targeted tests, and greater confidence in sensor-based capabilities.
Example applications
Training data for drone detection in all weather conditions
Systems for drone detection and classification need training and test data that remain robust under changing visibility, lighting, and atmospheric conditions. VAIVA can generate realistic training environments in which exact simulation ground truth is coupled with sensor-specific rendering aligned to real optical systems.
Detection of camouflaged enemy positions
Modern sensor systems must detect more than obvious targets. Increasingly, the task is to identify camouflaged positions, concealed assets, and hard-to-observe objects embedded in natural clutter.
VAIVA supports the generation of realistic training and test data for these conditions by physically plausibly modeling materials, vegetation, terrain, coverings, and camouflage structures. The representation can be adapted to different spectral bands - for example visible or IR - to support the development of perception functions that must work beyond classic daylight imaging.
Virtual design and evaluation of optronic systems
Before physical prototypes are built, defence programs often need to know whether an optronic system is correctly configured for its intended mission. Field of view, range, mounting position, resolution, and line-of-sight behavior significantly influence mission performance.
VAIVA makes it possible to realistically simulate landscapes, structures, terrain profiles, and platform contexts so that optronic systems for vehicle or weapon modules can already be virtually evaluated at an early stage. This supports faster design iterations and more informed technical decisions before hardware integration.
Simulation of terrain conditions for path planning
Autonomous and assisted mobility functions depend on how well perception systems interpret the environment ahead. Different surface conditions such as sand, mud, gravel, vegetation, or degraded ground can significantly influence route choice and path planning.
VAIVA can simulate these surfaces in a visually and operationally meaningful way. This allows image-based algorithms for path planning and terrain interpretation to be trained and tested across changing seasons, daylight conditions, and vegetation-specific shadow effects.
From Simulation Ground Truth to Sensor Truth
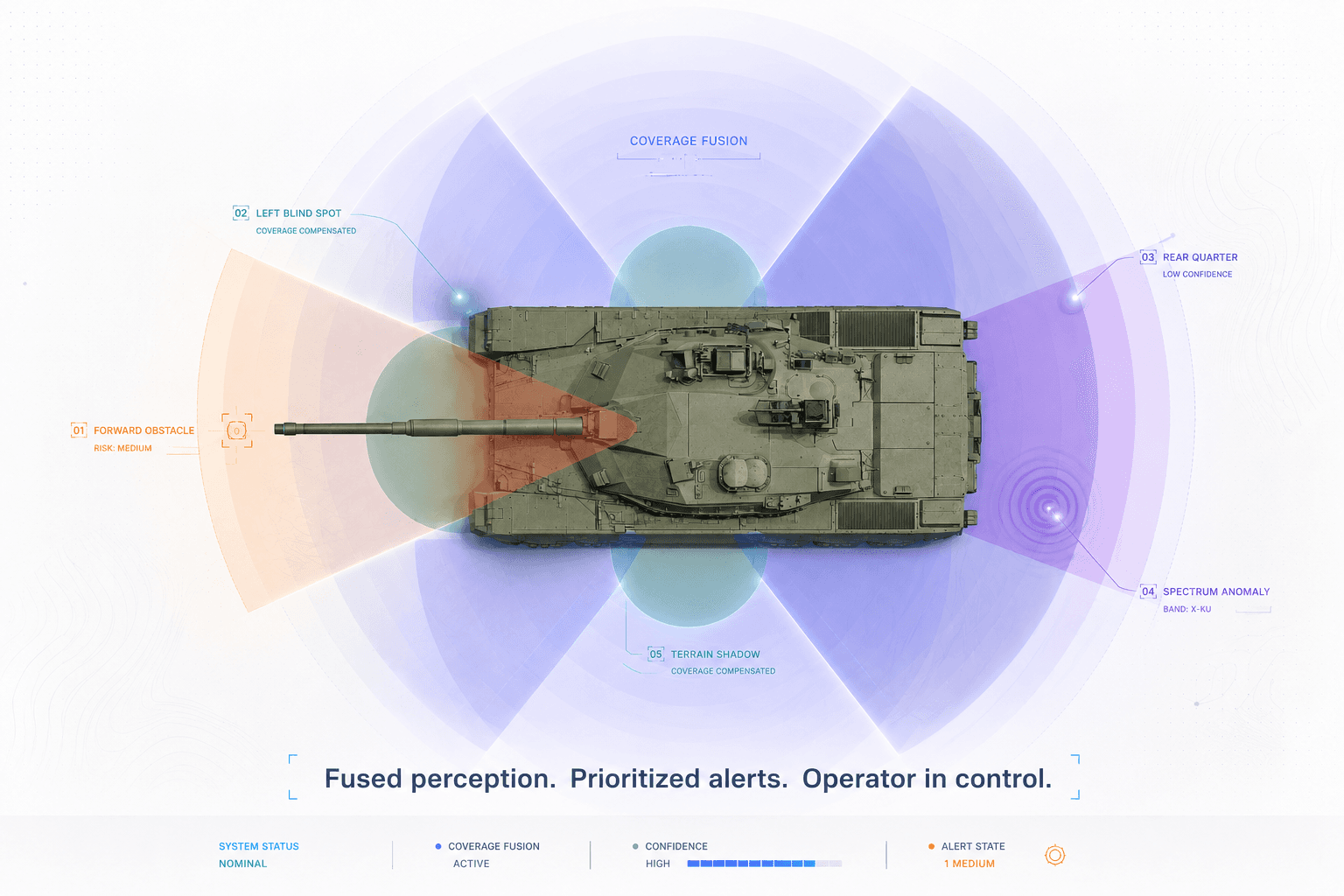
The value of synthetic environments depends on their fidelity. Development teams need not only visually plausible scenes, but sensor-relevant outputs that can be traced back to known ground truth.
VAIVA combines exact simulation ground truth with realistic sensor emulation, allowing developers to compare what is physically present in the scene and what the sensor would actually capture. This supports more meaningful training data, more robust algorithm evaluation, and better validation workflows for sensor-based defence systems.
The result is not simply synthetic imagery. It is a structured environment for building mission-ready perception systems.
Capability Section
Our work can include, among other things:
High-Fidelity Optical and Multispectral Sensor Emulation
Generation of sensor outputs that reflect how real systems perceive terrain, atmosphere, clutter, and targetsSimulation Ground Truth Integration
Linking exact scene truth with sensor-specific imagery for traceable development and evaluation workflowsTraining Data Generation
Creation of mission-relevant datasets for detection, classification, and perception tasks across variable lighting, weather, and seasonal conditionsCamouflage and Concealment Modelling
Representation of vegetation, coverings, material properties, and environmental clutter for realistic scenarios with hard-to-detect targetsVirtual Optronics Evaluation
Evaluation of line of sight, field of view, range, placement, and resolution before physical prototypes are availableTerrain and Surface Simulation
Modeling of ground conditions and environmental context for mobility-related perception and path-planning functionsSimulation and Validation Workflows
Testing perception systems under controlled, repeatable conditions before live trials and field deployment